Где находится двигатель у вертолета. Как летает вертолет. Аккумулятор бортового питания
Процесс изменения сил и моментов, обеспечивающих полет вертолета по заданной траектории, называют управлением, а комплекс соответствующих устройств составляет систему управления (СУ) (рис. 3.1.1).
Рис. 3.1.1. Управление вертолета: а – система осей вертолета; б – управление общим шагом; в – продольное управление; г – поперечное управление; д – путевое управление.
Управление вертолетом может осуществляться:
– непосредственно летчиком;
– летчиком, а также механизмами и устройствами, служащими для облегчения процесса управления и улучшения его качества (полуавтоматическая система);
– системой, в которой создание и изменение управляющих сил и моментов осуществляется комплексом автоматических устройств, а роль летчика сводится к отладке этих устройств и наблюдению за правильностью их работы.
СУ вертолетом состоит из ручного и ножного управления.
Ручное управление предназначено для воздействия на автомат перекоса (АП) НВ и разделяется на управление общим шагом (управление подъемной силой НВ по оси У) и циклическим шагом НВ (продольное и поперечное управление относительно осей X и Z).
Управление общим шагом летчик осуществляет при помощи рычага, расположенного слева от него. Управление циклическим шагом НВ производится правой рукой.
Ножным управлением создается момент М относительно вертикальной оси вертолета и осуществляется путевое управление (рысканье). На вертолете одновинтовой схемы путевое управление предназначено для изменения общего шага РВ, на вертолетах соосной схемы – для дифференциального изменения общего шага НВ.
Движение рук и ног летчика при управлении вертолетом соответствует естественным рефлексам человека. При перемещении ручки вперед, т.е. от себя, вертолет опускает нос (появляется пикирующий момент тангажа Мг относительно оси Z) и увеличивает горизонтальную скорость полета Vх при повышении мощности двигателя.
При движении ручки назад, т.е. на себя, появляется кабрирующий момент Мz и происходит соответствующее движение вертолета назад (вперед хвостом).
Движение ручки влево вызывает левый крен вертолета (относительно оси X) и при увеличении мощности двигателя – полет боком влево вдоль оси Z. Движение ручки вправо вызывает правый крен и полет боком вправо.
Движением левой ноги вперед вертолет поворачивается налево, правой ноги – направо.
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К СИСТЕМЕ УПРАВЛЕНИЯ ВЕРТОЛЕТА
Выбор той или иной системы управления или их сочетания зависит от специфических особенностей вертолетов.
Основной задачей конструктора является создание такой СУ, которая наиболее точно осуществляет кинематическую связь между командными рычагами и органами управления. Эта задача значительно усложняется при увеличении полетной массы вертолета из-за роста нагрузок на органы управления, а также вследствие увеличения расстояния между командными рычагами и органами управления.
Летчик в общем случае решает две по существу различные задачи: одна из них – стабилизация положения вертолета в пространстве; вторая – управление траекторией полета вертолета. Наиболее эффективным средством улучшения устойчивости вертолета с шарнирным НВ является система автоматической стабилизации, называемая автопилотом.
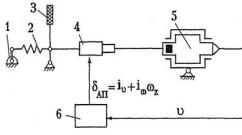
Включение автопилота в СУ вертолета производится по т.н. дифференциальной схеме (рис. 3.1.2).

Рис. 3.1.2. Включение автопилота в систему управления по дифференциальной схеме: 1 – муфта автотриммера; 2 – загрузочная пружина; 3 – ручка управления;
4 – раздвижная тяга; 5 – силовой цилиндр; 6 – автопилот.
В этой схеме применяются рулевые приводы, работающие одновременно как от сигналов автопилота, так и от воздействия летчика. При дифференциальном включении рулевых машин рычаг управления, например, ручка, может быть неподвижным (или перемещаться летчиком), в то время как соответствующий орган управления независимо от ручки отклоняется под воздействием сигналов автопилота, но его максимально возможное отклонение обычно ограничено диапазоном шириной около 20% полного хода.
В то же время для быстрого изменения режима полета или при отказе автопилота летчик всегда может вмешиваться в управление, непосредственно отклоняя ручку управления. Дифференциальное включение автопилота обеспечивает устойчивость вертолета на всех режимах в течение всего времени полета.
Вертолеты, управление которыми невозможно или затруднительно без применения гидроусилителей (ГУ) или бустеров, должны иметь, кроме основной гидравлической системы, дублирующую. На вертолетах, управление которыми возможно без усилительных механизмов, допускается установка только основной усилительной системы.
ГУ состоит из исполнительного механизма (силового привода), следящего элемента (золотника) и связи между ними (рис. 3.1.3).

Рис. 3.1.3. Принципиальная схема работы гидроусилителя:
1 – ручка управления; 2 – ограничитель хода золотника; 3 – головка ГУ; 4 – золотник; 5 – силовой цилиндр; 6 – поршень силового штока.
При нейтральном положении золотника гидросмесь не поступает в силовой цилиндр и система остается неподвижной. Если сдвинуть золотник, то одна из полостей цилиндра соединяется с питающей магистралью гидросистемы, а другая – со сливной. Под действием разности давлений в полостях шток силового цилиндра начнет перемещаться, поворачивая лопасть относительно осевого шарнира. Одновременно со штоком в ту же сторону будет перемещаться и корпус золотника (через механическую обратную связь), стремясь снова перекрыть питающую и сливную магистрали. Если летчик или автопилот перестанут смещать золотник – он остановится. Таким образом, каждому положению тяги управления золотником, а следовательно, и ручки управления, связанной с ним, соответствует свое положение исполнительного штока.
На вертолетах по всех каналах применяют необратимую бустерную систему управления. Усилия, возникающие в проводке управления от шарнирных моментов на органах управления, не передаются на рычаги управления вертолетом, т.к. целиком воспринимаются ГУ. Для имитации усилий от органов управления в систему включаются загрузочные механизмы. В этом случае пилот преодолевает усилие не от шарнирных моментов лопастей, а от сжатия или растяжения пружины загрузочного механизма (рис. 3.1.4). К загрузочному устройству присоединяется т.н. механизм триммерного эффекта. При включении этого механизма снимается (по желанию пилота при длительном полете) усилие с ручки (педали).

Рис. 3.1.4. Схемы «автотриммирования»:
а – схема «автотриммирования» с применением электромеханизма: 1 – электромеханизм с самотормозящейся червячной парой; 2 – концевые выключатели;
3 – триммерная кнопка; 4 – ручка управления; 5 – пружинный механизм;
б – схема «автотриммирования» с применением электромагнитной муфты:
1 – электромагнитная муфта; 2 – триммерная кнопка; 3 – ручка управления; 4 – пружинный механизм.
Люфты в управлении неблагоприятно влияют на управляемость вертолета. Если имеется люфт на участке между ручкой и золотником ГУ, то после страгивания ручки золотник переместится лишь после выбора люфта. При наличии люфта между ручкой и загрузочным механизмом летчик ощутит усилие от последнего уже после начала поворота лопастей и реагирования вертолета. Это нарушение чувства управления может вызвать раскачку вертолета.
Появление чрезмерного суммарного люфта в проводке управления может привести к самопроизвольному перемещению управляющих золотников и включению ГУ.
В СУ вертолета должна быть обеспечена независимость действия продольного, поперечного, путевого управления и общего шага НВ.
±170 мм – для продольного отклонения ручки;
± 125 мм – для поперечного отклонения ручки;
± 100 мм – для отклонения педалей.
В системах прямого управления летчику приходится преодолевать не только шарнирный момент от лопастей НВ и РВ, но и трение во всех шарнирных узлах системы. При необратимом бустерном управлении летчик преодолевает усилия трения в узлах управления, установленных до золотника, и усилие трения в золотнике. Рекомендуется, чтобы усилия на органах управления, потребные для преодоления сил трения в системе управления, не превышали величин, указанных в табл. 3.1
Таблица 3.1.1
Для вертолетов максимальной взлетной массой более 15т допускаются несколько большие значения сил трения (до 25-30%) при максимальных усилиях на ручке управления и педалях в случаях полного их отклонения от среднего положения при нейтральном положении триммера.
Для облегчения пилотирования должно обеспечиваться самоцентрирование рычагов продольного и поперечного управления. Величина предварительной затяжки пружины загрузочного механизма должна превышать усилие трения примерно на 20%.
Усилия на рычаг продольного управления при выполнении установившихся и переходных режимов в случаях отказа двигателя, основной гидросистемы, автопилота и триммера не должны превышать более чем на на 30% рекомендуемые значения максимальных усилий (табл. 3.2).
Таблица 3.1.2
Максимальные усилия в поперечном и путевом каналах определяются соотношениями
Р х = (0,5 – 0,7) Р в
Р п = (2,0 – 2,5) Р в .
Деформация фюзеляжа и других частей вертолета, по которым идет проводка управления, не должна вызывать дополнительных усилий на ручке и педалях.
Из-за упругости фюзеляжа появляется возможность возникновения недопустимых автоколебаний в системе механическая проводка – золотник – гидроусилитель – упругий фюзеляж. Возможное изменение установочных углов лопастей при деформации конструкции должно давать демпфирующие аэродинамические силы на НВ.
Ручка управления, педали и рычаг общего шага должны иметь ограничители своих отклонений. Ограничители ставятся непосредственно на органах управления, если в СУ нет ГУ, или на ГУ.
Минимальная жесткость проводки управления должна определяться из условия обеспечения безопасности от флаттера лопасти НВ и РВ и подвижного оперения, а также из условия отсутствия опасных в отношении прочности вибраций в самой проводке управления.
Углы отклонения командных рычагов управления должны иметь запас, т.е. быть больше, чем требуется по расчету или экспериментальным данным.
Все рычаги и тяги управления в кабинете должны быть расположены таким образом и иметь такую форму, чтобы не стеснять движения летчика при работе, не мешать ему входить в кабину и покидать ее. Педали ножного управления в кабине должны допускать регулировку под рост летчика, кроме того необходимо обеспечить удобство осмотра, монтажа и демонтажа деталей и агрегатов управления.
Каждая деталь СУ должна быть спроектирована таким образом, чтобы предотвратить заклинивание, истирание и задевание вследствие воздействий груза, пассажиров, незакрепленных предметов или замерзания влаги.


Рис. 4.1. Автожир. Рис. 4.2. Вертоліт одногвинтової схеми з хвостовим гвинтом.


Рис. 4.3. Одногвинтової гвинтокрил. Рис. 4.4. Конвертоплан.

Вертоліт Карно.

Рис. 4.5. Схема вертольота с одним НВ і одним РВ:
1
– фюзеляж; 2
, 3
– лобове скло кабіни; 4
– силова установка; 5
– несучий гвинт; 6
– рульовий гвинт;
7
– кільова балка (кіль); 8
– стабілізатор; 9
– хвостова опора; 10
– хвостова балка; 11
– шасі; 12
– крило з вузлами підвіски вантажів; 13
– вихідні пристрої основного двигуна і двигуна допоміжної силової установки.


Рис. 4.6. Вертоліт з двогвинтовий Рис. 4.7. Вертоліт з двогвинтовий
поздовжньою схемою розташування НГ. поперечною схемою розташування НГ.


Рис. 4.8. Співвісна схема вертол. с двома НГ. Рис. 4.9. Кут установки лопаті гвинта вертольота.


Рис. 4.10. Поднімальна сила лопаті Рис. 4.11. Моменты, що діють на вертоліт.
гвинта вертольота.

Рис. 4.12. Система керування одногвинтовим вертольотом:
1 - ручка керування; 2 - зовнішнє кільце автомата перекосу; 3, 4, 5 - тяги (повідці);
6 - лопать НГ; 7 - лопать РГ; 8 - важіль загального кроку (крок - газ); 9 - ножні педалі.
Колонка поздовжньо-поперечного керування вертольотомМі – 8

Колонка поздовжньо-поперечного керування:
1
– важіль керування гальмами коліс шасі; 2
– колонка послідовного включення СПУ і радіо; 3
– кнопка виключення автопілоту; 4
– кнопка спецпризначення; 5
– кнопка включення ЭМТ-2М; 6
– рукоятка; 7
– труба ручки; 8
– чохол; 9
– корпус; 10
– регулювальний гвинт; 11
– кронштейн; 12
– стакан; 13
– шарнірна тяга; 14
– кожух;
15
– вісь; 16
, 18
– качалки; 17
– балансувальний вантаж; 19
– підшипники; 20
– важіль.
Педалі шляхового керування вертольотом Мі – 8

Педалі шляхового керування:
1
– гашетка; 2
– підніжка; 3
– кутовий важіль; 4
– основа; 5
– гвинтовий упор;
6
– кронштейн; 7
– важіль, що вирівнює; 8
– регулювальний гвинт з маховиком.
Для того чтобы вертолет обладал высокими летно-техническими характеристиками и был эффективным транспортным средством, удобным в эксплуатации, он должен отвечать ряду требований. Эти требования можно разделить на общие для всех летательных аппаратов (ЛА) и специальные, зависящие от целевого назначения и особенностей боевого применения.
К общим требованиям относятся:
- - получение назначенных летно-технических данных, достаточных характеристик устойчивости и управляемости при наименьших энергетических затратах;
- - достаточная (но не избыточная) прочность и жесткость конструкции, обеспечивающие восприятие эксплуатационных нагрузок без остаточных деформаций и отсутствие опасных колебаний;
- - высокая боевая живучесть, т. е. способность ЛА продолжать выполнение задания после воздействия на него поражающих средств противника;
- - надежность конструкции, которая зависит от ее совершенства, качества изготовления, условий эксплуатации;
- - технологичность конструкции, т. е. возможность широкой механизации и автоматизации производственных процессов, использования высокопроизводительных процессов (штамповки, прокатки, сварки и т. п.), высокая степень стандартизации деталей и узлов;
- - минимальная масса конструкции, что обеспечивается рациональным выбором материалов, силовых схем, а также уточнением действующих нагрузок;
- - удобство эксплуатации, обеспечиваемое достаточным количеством эксплуатационных разъемов, люков для осмотра и выполнения работ на технике, минимальным числом узлов и систем, требующих регулировки, применением эффективных средств контроля;
- - ремонтопригодность, т. е. возможность быстрого и дешевого восстановления поврежденных частей, что обеспечивается взаимозаменяемостью основных частей и элементов, широким использованием модульных конструкций;
- - безопасность полета, обеспечиваемая надежностью техники, хорошими аэродинамическими характеристиками, применением специальной автоматики, облегчающей пилотирование, сигнализацией о приближении к опасным режимам полета.
Многие из этих требований противоречивы. В ходе проектирования вертолетов происходит преодоление этих противоречий путем принятия компромиссных решений или разработки принципиально новых конструкций.
В связи с усложнением авиационной техники и повышением требований к уровню безопасности полетов существенно возросла важность эргономических требований к JTA. Эргономические требования сводятся к приспособленности ЛА, его кабины, командных рычагов управления, приборного и другого оборудования к физиологическим и психологическим возможностям человека для наиболее эффективного использования возможностей как ЛА, так и летчика. В этом отношении весьма важно правильное распределение функций между автоматикой JIA и летчиком.
Эргономические требования включают гигиенические, антропометрические, физиологические и психофизиологические требования к Л А. Гигиенические требования сводятся к соблюдению норм микроклимата и ограничению воздействия вредных факторов внешней среды на человека (шума, вибраций, температуры и т. д.). Антропометрические требования определяют размеры кабины, командных рычагов управления, их расположение в соответствии с ростом человека, длиной его конечностей и т. д. Физиологические требования задают величины управляющих усилий в соответствии с возможностями человеческого организма. Психофизиологические требования характеризуют приспособленность ЛА, приборного оборудования к особенностям органов чувств человека.
Кроме перечисленных выше общих требований к вертолетам предъявляются специальные требования, отражающие специфику их конструкции, режимов полета, способов создания подъемной силы, управления и так далее.
К специальным требованиям относятся:
- - обеспечение вертикального взлета и посадки, висения на заданной высоте;
- - обеспечение безопасной посадки на режиме самовращения несущего винта (НВ) при отказе силовой установки;
- - допустимый уровень вибраций.
При разработке военного вертолета к нему предъявляются специальные требования, определяемые его назначением и условиями боевого применения, так называемые тактико-технические требования (ТТТ). Они задают летно-технические характеристики, необходимые для эффективного выполнения поставленных боевых задач: максимальную скорость, дальность полета, потолок, полезную нагрузку, состав экипажа, необходимое оборудование и вооружение. ТТТ разрабатываются с учетом современного уровня развития науки- и- техники и ближайших перспектив их развития.
Классификация вертолетов по конструктивным признакам
Вертолетом называют ЛА, у которого подъемная сила и тяга для поступательного полета создаются лопастями одного или нескольких вращающихся НВ. В отличие от крыла самолета лопа- ети НВ обтекаются набегающим потоком не только при поступательном полете, но и при работе на месте. Это обеспечивает вертолету возможность висеть неподвижно, взлетать и садиться вертикально.
В ходе зарождения и развития вертолетов было опробовано большое число различных схем, от простейших до сложных комбинированных ЛА. В результате были отброшены неудачные и выявились жизнеспособные схемы вертолетов, используемые в настоящее время.
Основным критерием различия этих схем принято считать количество и расположение несущих винтов. По числу НВ вертолеты могут быть одновинтовыми, двухвинтовыми и многовинтовыми. Современные вертолеты строятся только по одновинтовой и двухвинтовой схемам.
Одновинтовая схема отличается сравнительно малой массой, наибольшей простотой конструкции и системы управления. Однако для уравновешивания реактивного момента НВ такого вертолета необходим рулевой винт, потребляющий до 10% мощности силовой установки. Он устанавливается на длинной балке, увеличивающей габариты и массу вертолета, создает опасность для обслуживающего персонала.
Недостатком одновинтового вертолета является также узкий диапазон допустимых центровок, поскольку его балансировка возможна при условии, что центр масс расположен вблизи оси вала НВ.
НВ двухвинтовых вертолетов вращаются в противоположных направлениях, поэтому их реактивные моменты уравновешивают друг друга без дополнительных затрат мощности.
Вертолеты продольной схемы наиболее распространены среди двухвинтовых вертолетов благодаря ряду преимуществ:
- - большой удобный фюзеляж;
- - сравнительно широкий диапазон допустимых центровок благодаря возможности перераспределения тяги между НВ;
- - хорошая продольная устойчивость и управляемость.
Продольная схема, однако, имеет ряд серьезных недостатков:
- - сложная и длинная трансмиссия для передачи мощности к винтам и синхронизации их вращения в целях исключения столкновения лопастей;
- - повышенный уровень вибраций;
- - сложная система управления;
- - отрицательное влияние переднего НВ на работу заднего, приводящее к значительным потерям мощности и усложнению конструкции редукторов и техники посадки на режиме самовращения НВ; для снижения вредного влияния задний НВ располагается выше переднего.
Двухвинтовые вертолеты поперечной схемы имеют ряд положительных качеств:
- - удобный обтекаемый фюзеляж самолетного типа;
- - удобство погрузки и выгрузки кабины;
- - благоприятное взаимное влияние несущих винтов.
Серьезным недостатком поперечной схемы является необходимость специальной конструкции для размещения винтов, которая имеет большие лобовое сопротивление и массу. Для снижения лобового сопротивления эта конструкция может быть выполнена в виде крыла.
К недостаткам поперечной схемы следует также отнести узкий диапазон центровок и необходимость длинной трансмиссии для синхронизации НВ, трудности обеспечения устойчивости и управляемости.
Двухвинтовые вертолеты соосной схемы обладают наименьшими габаритами. НВ вертолета соосной схемы расположены один над другим и не требуют синхронизации вращения, что значительно упрощает и облегчает трансмиссию. Аэродинамическая симметрия схемы упрощает пилотирование и прицеливание.
Однако соосной схеме присущи определенные недостатки:
- - сложная система управления;
- - недостаточная путевая устойчивость;
- - значительные вибрации;
- - опасность столкновения лопастей НВ, вращающихся в противоположных направлениях;
- - сложность посадки на режиме самовращения НВ.
Советским конструкторам удалось справиться с трудностями доводки опытных вертолетов такой схемы, и они выпускаются серийно.
У двухвинтового вертолета с перекрещивающимися винтами оси НВ расположены по бокам фюзеляжа и наклонены наружу. Ввиду потерь мощности, связанных с наклоном НВ, и очень сложной системой управления такая схема не получила широкого распространения.
Скорость полета вертолетов любых схем ограничена условиями обтекания НВ. При увеличении скорости полета концевые участки лопастей испытывают влияние сжимаемости воздуха и попадают в режим срыва потока, что приводит к сильным вибрациям и резкому увеличению потребляемой мощности. Поэтому максимальная скорость горизонтального полета обычных вертолетов не превышает 320-340 км/ч.
Для дальнейшего увеличения скорости полета необходимо разгрузить НВ. С этой целью на вертолет устанавливается крыло.
Дополнительная тяга в направлении полета вертолета может создаваться воздушным винтом (тянущим или толкающим) или турбореактивным двигателем. Скорость таких комбинированных ЛА может достигать 500 км/ч и выше. Несмотря на сложность конструкции, вертолеты комбинированной схемы являются перспективными.
В настоящее время наибольшее распространение у нас в стране и во всем мире получили вертолеты, выполненные по одновинтовой схеме с рулевым винтом.
Основные части вертолета, их назначение и компоновка

В процессе развития вертолетостроения сложился вполне определенный облик современного вертолета.
Основной частью вертолета является фюзеляж, предназначенный для размещения грузов, экипажа, оборудования, топлива и т. п. Кроме того, он является силовой базой, к которой крепятся все остальные части вертолета и передаются нагрузки от них. Фюзеляж представляет собой тонкостенную подкрепленную конструкцию. Центральная часть фюзеляжа обычно является грузовой кабиной, носовая - кабиной экипажа.
Хвостовая 8 и концевая 6 балки являются продолжением фюзеляжа и предназначены для размещения рулевого винта и оперения вертолета.
На потолочной панели центральной части фюзеляжа устанавливаются двигатели 1 (обычно два газотурбинных двигателя), выходные валы которых соединяются с главным редуктором.
Главный редуктор распределяет мощность, поступающую от двигателей, между агрегатами вертолета. Основным потребителем мощности двигателей является НВ, установленный на валу главного редуктора. Он предназначен для создания силы тяги, необходимой для полета вертолета, а также для продольного и поперечного управления.
Основными частями НВ являются: втулка 2 и прикрепленные к ней лопасти 3, непосредственно создающие подъемную силу.
При вращении НВ на вертолет действует реактивный момент, стремящийся развернуть его в противоположном направлении. Для уравновешивания этого момента служит рулевой винт 5. Его привод осуществляется от главного редуктора через систему валов и редукторов. Кроме того, рулевой винт используется для путевого управления вертолетом.
Шасси обеспечивает обирание вертолета при стоянке и передвижении по поверхности земли, а также снижение нагрузок при посадке.
Наибольшее распространение получила трех-опорная схема шасси с носовым колесом: основные опоры 9 располагаются позади центра масс вертолета, передняя 12-под носовой частью фюзеляжа. На скоростных вертолетах шасси может убираться в полете.
Оперение предназначено для повышения устойчивости вертолета. Оно состоит из стабилизатора 7 и киля, роль которого играет обычно специально спрофилированная концевая балка.
Компоновка двухвинтового вертолета соосной схемы отличается компактностью ввиду меньшего диаметра винтов и отсутствия рулевого винта с хвостовой и концевой балками. Однако соосное расположение НВ увеличивает высоту вертолета, а недостаточная путевая устойчивость требует установки достаточно мощного вертикального оперения.
ОБЩАЯ ХАРАКТЕРИСТИКА ВЕРТОЛЕТА Ми-8Т
1. ОБЩИЕ СВЕДЕНИЯ О ВЕРТОЛЕТЕ
Вертолет Ми-8 предназначен для перевозки различных грузов внутри грузовой кабины и на внешней подвеске, почты, пассажиров, а также для проведения строительно-монтажных и других работ в труднодоступной местности.
Рис. 1.1. Вертолет Ми-8 (общий вид)
Вертолет (рис. 1.1) спроектирован по одновинтовой схеме с пятилопастным несущим и трехлопастным рулевым винтами. На вертолете установлены два турбовинтовых двигателя ТВ2-117А со взлетной мощностью 1500 л.с. каждый, что обеспечивает высокую безопасность полетов, так как полет возможен и при отказе одного из двигателей.
Вертолет эксплуатируется в двух основных вариантах: пассажирском Ми-8П и транспортном Ми-8Т. Пассажирский вариант вертолета предназначен для межобластных и местных перевозок пассажиров, багажа, почты и малогабаритных грузов. Он рассчитан на перевозку 28 пассажиров. Транспортный вариант предусматривает перевозку грузов массой до 4000 кг или пассажиров в количестве 24 человек. По желанию заказчика пассажирский салон вертолета может быть переоборудован в салон с повышенным комфортом на 11 пассажиров.
Пассажирский и транспортный варианты вертолета могут быть переоборудованы в санитарный вариант и в вариант для работы с внешней подвеской.
Вертолет в санитарном варианте позволяет перевозить 12 лежачих больных и сопровождающего медработника. В варианте для работы с внешней подвеской осуществляется перевозка крупногабаритных грузов массой до 3000 кг вне фюзеляжа.
Для перелетов вертолета на большие дальности предусмотрена установка в грузовой кабине одного или двух дополнительных топливных баков.
Существующие варианты вертолета снабжены электролебедкой, позволяющей с помощью бортовой стрелы производить подъем (спуск) на борт вертолета грузов массой до 150 кг, а также при наличии полиспаста затягивать в грузовую кабину колесные грузы массой до 3000 кг.
Экипаж вертолета состоит из двух пилотов и бортмеханика.
При создании вертолета особое внимание было уделено высокой надежности, экономичности, простоты в обслуживании и эксплуатации.
Безопасность полетов на вертолете Ми-8 обеспечивается:
Установкой на вертолете двух двигателей ТВ2-117А(АГ), надежностью работы этих двигателей и главного редуктора ВР-8А;
Возможностью совершать полет в случае отказа одного из двигателей, а также перейти на режим авторотации (самовращения несущего винта) при отказе обоих двигателей;
Наличием отсеков, изолирующих двигатели и главный редуктор с помощью противопожарных перегородок;
Установкой надежной противопожарной системы, обеспечивающей тушение пожара в случае его возникновения как одновременно во всех отсеках, так и в каждом отсеке в отдельности;
Установкой дублирующих агрегатов в основных системах я оборудовании вертолета;
Надежными и эффективными противообледенительными устройствами лопастей несущего и рулевого винтов, воздухозаборников двигателей и лобовых стекол кабины экипажа, что позволяет совершать полет в условиях обледенения;
Установкой аппаратуры, обеспечивающей простое и надежное пилотирование и посадку вертолета в различных метеорологических условиях;
Приводом основных агрегатов систем от главного редуктора, обеспечивающим работоспособность систем при отказе двигателя:
Возможностью быстрого покидания вертолета после его посадки пассажирами и экипажем в аварийных случаях.
2. ОСНОВНЫЕ ДАННЫЕ ВЕРТОЛЕТА
Летные данные
(транспортный и пассажирский варианты)
Взлетная масса (нормальная), кг.............. 11100
Максимальная скорость полета (по прибору), км/ч, 250
Статический потолок, м............................ 700
Крейсерская скорость полета по прибору на высоте
500 м, км/ч ………………………………………………220
Экономическая скорость полета (по прибору), км/ч. 120
топливом 1450 кг, км................................ 365
варианте с заправкой топливом 2160 кг, км. . .620
Дальность полета (на высоте 500 м) в перегоночном
варианте с заправкой топливом 2870 кг, км... 850
Дальность полета (на высоте 500 м) с заправкой
топливом 2025 кг (подвесные баки увеличенной
вместимости), км................................................ 575
Дальность полета (на высоте 500 м) в перегоночном
варианте с заправкой топливом 2735 кг (подвесные баки
увеличенной вместимости), км.... 805
Дальность полета (на высоте 500 м) в перегоночном
варианте с заправкой топливом 3445 кг (подвесные баки
увеличенной вместимости), км.... 1035
Примечание. Дальность полета рассчитана с учетом 30-минутного остатка топлива после посадки
Геометрические данные
Длина вертолета, м:
без несущего и рулевого винтов.................. 18,3
с вращающимися несущим и рулевым винтами …25,244
Высота вертолета, м:
без рулевого винта........................................ 4,73
с вращающимся рулевым винтом................ 5,654
Расстояние от конца лопасти несущего винта до
хвостовой балки на стоянке, м..................... 0,45
Расстояние от земли до нижней точки фюзеляжа
(клиренс), м................................................... 0,445
Площадь горизонтального оперения, м 2 ….. 2
Стояночный угол вертолета................. 3°42"
Фюзеляж
Длина грузовой кабины, м:
без грузовых створок............................ 5,34
с грузовыми створками на уровне 1 м от пола 7,82
Ширина грузовой кабины, м:
на полу................................................... 2,06
по коробам отопления........................... 2,14
максимальная......................................... 2,25
Высота грузовой кабины, м.................. 1,8
Расстояние между силовыми балками пола, м … 1,52
Размер аварийного люка, м…………………… 0,7 X1
Колея погрузочных трапов, м.............. 1,5±0,2
Длина пассажирской кабины, м............ 6,36
Ширина пассажирской кабины (по полу), м... 2,05
Высота пассажирской кабины, м 1,8
Шаг кресел, м.................................................. 0,74
Ширина прохода между креслами, м... 0,3
Размеры гардероба (ширина, высота, глубина), м 0,9 X1,8 X 0,7
» сдвижной двери (ширина, высота), м. . 0,8 X1.4
» проема, по заднюю входную дверь в пассажирском
варианте (ширина, высота), м.......... 0,8 X1>3
Размер аварийных люков в пассажирском
варианте, м............................................. 0,46 X0,7
Размер кабины экипажа, м.................... 2,15 X2,05 X1,7
Регулировочные данные
Угол установки лопастей несущего винта (по указателю шага винта):
минимальный................................................. 1°
максимальный........................................ 14°±30"
Угол отгиба триммерных пластин лопастей винта -2 ±3°
» установки лопастей рулевого винта (на r=0,7) *:
минимальный (левая педаль до упора) ................... 7"30"±30"
максимальный (правая педаль до упора)………….. +21°±25"
* r- относительный радиус
Весовые и центровочные данные
Взлетная масса, кг:
максимальная для транспортного варианта …….. 11100
» с грузом на внешней подвеске …………… 11100
транспортный вариант.......................... 4000
на внешней подвеске.............................. 3000
пассажирский вариант (человек).......... 28
Масса пустого вертолета, кг:
пассажирский вариант........................... 7370
транспортный »................................ 6835
Масса служебной нагрузки, в том числе:
масса экипажа, кг................................... 270
» масла, кг........................................................... 70
масса продуктов, кг.............................................. 10
» топлива, кг......................................................... 1450 - 3445
» коммерческой нагрузки, кг............................... 0 - 4000
Центровка пустого вертолета, мм:
транспортный вариант........................................... +133
пассажирский » ....................................... +20
Допустимые центровки для загруженного вертолета, мм:
передняя.................................................................. +370
задняя...................................................................... -95
3. АЭРОДИНАМИЧЕСКИЕ И ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВЕРТОЛЕТА
По аэродинамической схеме вертолет Ми-8 представляет собой фюзеляж с пятилопастным несущим, трехлопастным рулевым винтами и неубирающимися шасси.
Лопасти несущего винта прямоугольной формы в плане с хордой, равной 0,52 м. Прямоугольная форма в плане в аэродинамическом отношении считается хуже других, но она проста в производстве. Наличие триммерных пластин на лопастях позволяет изменять их моментные характеристики.
Профиль лопасти является важнейшей геометрической характеристикой несущего винта. На вертолете подобраны различные профили по длине лопасти, что заметно улучшает не только аэродинамические характеристики несущего винта, но и летные свойства вертолета. От 1-го до 3-го сечения применен профиль NACA-230-12, а от 4-го до 22-го - профиль NACA-230-12M (модифицированный) *. У профиля NACA-230-12M число Мкр = 0,72 при угле атаки нулевой подъемной силы. При увеличении углов атаки a°(рис. 1.2) Мкр уменьшается и при наивыгоднейшем угле атаки, при котором коэффициент подъемной силы С у = 0,6, Мкр = 0,64. В этом случае критическая скорость в стандартной атмосфере над уровнем моря составит:
V KP == а Мкр = 341 0,64 = 218 м/с, где a- скорость звука.
Следовательно, на концах лопастей можно создавать скорость менее 218 м/с, при которой не будет появляться скачков уплотнения и волнового сопротивления. При оптимальной, частоте вращения несущего винта 192 об/мин окружная скорость концов лопастей составит:
U = wr = 2 prn / 60 = 213,26 м/с, где w - угловая скорость;
r- радиус окружности, описываемый концом лопасти.
 Рис. 1.2. Изменение коэффициента подъемной силы С у от углов атаки a° и числа М профиля NACA-230-12M
Рис. 1.2. Изменение коэффициента подъемной силы С у от углов атаки a° и числа М профиля NACA-230-12M
Отсюда видно, что окружная скорость близка к критической, но не превышает ее. Лопасти несущего винта вертолета имеют отрицательную геометрическую крутку, изменяющуюся по линейному закону от 5° у 4-го сечения до 0° у 22-го. На участке между 1-ми 4-м сечениями крутка отсутствует и установочный угол сечений лопасти на этом участке равен 5°. Крутка лопасти на такую большую величину существенно улучшила ее аэродинамические свойства и летные характеристики вертолета, в связи с чем более равномерно распределяется подъемная сила по длине лопасти.
* Отсек от 3-го до 4-го сечения является переходным. Профиль лопасти несущего винта - смотри рис. 7.5.
Лопасти винта имеют переменную как абсолютную, так и относительную толщину профиля. Относительная толщина профиля с составляет в комле 13%, на участке от г=_0,23до 7=0,268- 12%, а на участке от г = 0,305 до конца лопасти- 11,38%. Уменьшение толщины лопасти к ее концу улучшает аэродинамические свойства винта в целом за счет увеличения критической скорости и Мкр концевых частей лопасти. Уменьшение толщины лопасти к концу приводит к уменьшению лобового сопротивления и снижению потребного крутящего момента.
Несущий винт вертолета имеет сравнительно большой коэффициент заполнения - 0,0777. Такой коэффициент дает возможность создать большую тягу при умеренном диаметре винта и тем самым удерживать в полете лопасти на небольших установочных углах, при которых углы атаки ближе к наивыгоднейшим на всех режимах полета. Это позволило увеличить к. п. д. винта и отодвинуть срыв потока на большие скорости.
 Рис. 1.3. Поляра несущего винта вертолета на режиме висения: 1 - без влияния земли; 2 - с влиянием земли.
Рис. 1.3. Поляра несущего винта вертолета на режиме висения: 1 - без влияния земли; 2 - с влиянием земли.
Аэродинамическая характеристика несущего винта вертолета представлена в виде его поляры (рис. 1.3), которая показывает зависимость коэффициента тяги Ср и коэффициента крутящего момента т кр от величины общего шага несущего винта <р. По поляре видно, что чем больше общий шаг несущего винта, тем больше коэффициент крутящего момента, а следовательно, больше коэффициент тяги. При наличии «воздушной подушки» тяга несущего винта будет больше, чем без нее при том же шаге винта и коэффициенте крутящего момента.
Лопасти рулевого винта прямоугольной формы в плане с профилем NACA-230M не имеют геометрической крутки. Наличие у втулки рулевого винта совмещенного горизонтального шарнира типа «кардан» и компенсатора взмаха позволяет обеспечить более ровное перераспределение подъемной силы по ометаемой винтом поверхности в полете.
Фюзеляж вертолета аэродинамически несимметричен. Это видно из кривых изменения коэффициентов подъемной силы фюзеляжа С 9ф и лобового сопротивления С в зависимости от углов атаки а ф (рис. 1.4). Коэффициент подъемной силы фюзеляжа равен нулю при угле атаки несколько больше 1 , поэтому и подъемная сила будет положительной на углах атаки больше Г, а на углах атаки меньше 1 -отрицательной. Минимальное значение коэффициента лобового сопротивления фюзеляжа С будет при угле атаки, равном нулю. Ввиду того что на углах атаки больше или меньше нуля коэффициент С ф увеличивается, выгодно совершать полет на углах атаки фюзеляжа, близких к нулю. С этой целью предусмотрен угол наклона вала несущего винта вперед, составляющий 4,5°.
Фюзеляж без стабилизатора статически неустойчив, так как увеличение углов атаки фюзеляжа приводит к увеличению коэффициента продольного момента, а следовательно, и продольного момента, действующего на кабрирование и стремящегося к дальнейшему увеличению угла атаки фюзеляжа. Наличие стабилизатора на хвостовой балке фюзеляжа обеспечивает продольную устойчивость последнему лишь на малых установочных углах от +5 до -5° и в диапазоне небольших углов атаки фюзеляжа от -15 до + 10°. На больших углах установки стабилизатора и больших углах атаки фюзеляжа, что соответствует полету на режиме авторотации, фюзеляж статически неустойчив. Это объясняется срывом потока со стабилизатора. В связи с наличием у вертолета хорошей управляемости и достаточных запасов управления на всех режимах полета на нем применен стабилизатор, не управляемый в полете с установочным углом - 6°.
 Рис. 1.4. Зависимость коэффициента подъемной силы Суф и лобовогосопротивления Схф фюзеляжа от углов атаки a° фюзеляжа
Рис. 1.4. Зависимость коэффициента подъемной силы Суф и лобовогосопротивления Схф фюзеляжа от углов атаки a° фюзеляжа
В поперечном направлении фюзеляж устойчив лишь на больших отрицательных углах атаки -20° в диапазоне углов скольжения от -2 до + 6°. Это вызвано тем, что увеличение углов скольжения приводит к увеличению коэффициента момента крена, а следовательно, и поперечного момента, стремящегося и дальше увеличить угол скольжения.
В путевом отношении фюзеляж неустойчив практически на всех углах атаки при малых углах скольжения от -10 до +10°, на углах, больше указанных, характеристики устойчивости улучшаются. При углах скольжения 10° < b < - 10° фюзеляж нейтрален, а при скольжении больше 20° он приобретает путевую устойчивость.
Если рассматривать вертолет в целом, то хотя он и обладает достаточной динамической устойчивостью, но не вызывает больших затруднений при пилотировании даже без автопилота. Вертолет Ми-8 в общем оценен с удовлетворительными характеристиками устойчивости, а с включенными системами автоматической стабилизации эти характеристики значительно улучшились, вертолету придана динамическая устойчивость по всем осям и поэтому пилотирование существенно облегчается.
4. КОМПОНОВКА ВЕРТОЛЕТА
Вертолет Ми-8 (рис. 1.5) состоит из следующих основных частей и систем: фюзеляжа, взлетно-посадочных устройств, силовой установки, трансмиссии, несущего и рулевого винтов, управления вертолетом, гидравлической системы, авиационного и радиоэлектронного оборудования, системы отопления и вентиляции кабин, системы кондиционирования воздуха, воздушной и противообледенительной систем, устройства для внешней подвески грузов, такелажно-швартовочного и бытового оборудования. Фюзеляж вертолета включает носовую 2 и центральную 23 части, хвостовую 10 и концевую 12 балки. В носовой части, являющейся кабиной экипажа, размещены сиденья пилотов, приборные доски, электропульты, автопилот АП-34Б, командные рычаги управления. Остекление кабины экипажа обеспечивает хороший обзор; правый 3 и левый 24 блистеры снабжены механизмами аварийного сброса.
В носовой части фюзеляжа расположены ниши для установки контейнеров с аккумуляторами, штепсельные разъемы аэродромного питания, трубки приемников воздушного давления, две рулежно-посадочные фары и люк с крышкой 4 для выхода к силовой установке. Носовая часть фюзеляжа отделена от центральной части стыковочным шпангоутом № 5Н, в стенке которого имеется дверной проем. В проеме двери установлено откидное сиденье бортмеханика. Спереди, на стенке шпангоута № 5Н, расположены этажерки радио- и электрооборудования, сзади - контейнеры двух аккумуляторных батарей, коробка и пульт управления электролебедкой.
В центральной части фюзеляжа расположена грузовая кабина, для входа в которую слева имеется сдвижная дверь 22, снабженная механизмом аварийного сброса. У верхнего переднего угла проема сдвижной двери снаружи крепится бортовая стрела. В грузовой кабине вдоль правого и левого бортов установлены откидные сиденья. На полу грузовой кабины расположены швартовочные узлы и электролебедка. Над грузовой кабиной размещены двигатели, вентилятор, главный редуктор с автоматом перекоса и несущим винтом, гидропанель и расходный топливный бак.
К узлам фюзеляжа снаружи крепятся амортизаторы и подкосы главных 6, 20 и передней / стоек шасси, подвесные топливные баки 7, 21. Впереди правого подвесного топливного бака расположен керосиновый обогреватель.
Грузовая кабина заканчивается задним отсеком с грузовыми створками. В верхней части заднего отсека расположен радиоотсек, в котором установлены панели под приборы радио- и электрооборудования. Для входа из грузовой кабины в радиоотсек и хвостовую балку имеется люк. Грузовые створки закрывают проем в грузовой кабине, предназначенный для закатки и выкатки колесной техники, погрузки и выгрузки крупногабаритных грузов.
В пассажирском варианте к специальным профилям, расположенным по полу центральной части фюзеляжа, крепятся 28 пассажирских кресел. По правому борту в задней части кабины расположен гардероб. Правая бортовая панель имеет шесть прямоугольных окон, левая - пять. Задние бортовые окна встроены в крышки аварийных люков. Грузовые створки в пассажирском варианте укороченные, на внутренней стороне левой створки расположено багажное отделение, а в правой створке размещены короба под контейнеры с аккумуляторами. В грузовых створках сделан проем под заднюю входную дверь, состоящую из створки и трапа.

Рис. 1.5 Компоновочная схема вертолета.
1-передняя нога шасси; 2-носовая часть фюзеляжа; 3, 24-сдвижные блистеры; 4-крышка люка выхода к двигателям; 5, 21-главные ноги шасси; 6-капот обогревателя КО-50; 7, 12-подвесные топливные баки; 8-капоты; 9-редук-торная рама; 10-центральная часть фюзеляжа; 11-крышка люка в правой грузовой створке; 12, 19-грузовые створки; 13-хвостовая балка; 14-стабилизатор; 15-концевая балка; 16-обтекатель; 17-хвостовая опора; 18-трапы; 20-щиток створки; 23-сдвижная дверь; 25-аварийный люк-окно.
К центральной части фюзеляжа пристыкована хвостовая балка, к узлам которой крепится хвостовая опора и неуправляемый стабилизатор. Внутри хвостовой балки в верхней ее части проходит хвостовой вал трансмиссии. К хвостовой балке пристыкована концевая балка, внутри которой установлен промежуточный редуктор и проходит концевая часть хвостового вала трансмиссии. Сверху к концевой балке крепится хвостовой редуктор, на валу которого установлен рулевой винт.
Вертолет имеет неубирающееся шасси трехопорной схемы. Каждая стойка шасси снабжена жидкостно-газовыми амортизаторами. Колеса передней стойки самоориентирующиеся, колеса главных стоек снабжены колодочными тормозами, для управления которыми вертолет оборудован воздушной системой.
Силовая установка включает два двигателя ТВ2-117А и системы, обеспечивающие их работу.
Для передачи мощности от двигателей к несущему и рулевому винтам, а также для привода ряда агрегатов используется трансмиссия, состоящая из главного, промежуточного и хвостового редукторов, хвостового вала, вала привода вентилятора и тормоза несущего винта. Каждый двигатель и главный редуктор имеют свою автономную маслосистему, выполненную по прямой одноконтурной замкнутой схеме с принудительной циркуляцией масла. Для охлаждения маслорадиаторов двигателей и главного редуктора, стартер-генераторов, генераторов переменного тока, воздушного компрессора и гидронасосов на вертолете предусмотрена система охлаждения, состоящая из высоконапорного вентилятора и воздухопроводов.
Двигатели, главный редуктор, вентилятор и панель с гидроагрегатами закрыты капотом. При открытых крышках капота обеспечивается свободный доступ к агрегатам силовой установки, трансмиссии и гидросистемы, при этом открытые крышки капота двигателей и главною редуктора являются рабочими площадками для выполнения технического обслуживания систем вертолета.
Вертолет оборудован средствами пассивной и активной защиты от пожара. Продольная и поперечная противопожарные перегородки делят подкапотное пространство на три отсека: левого двигателя, правого двигателя, главного редуктора. Активная противопожарная система обеспечивает подачу огнегасящего состава из четырех баллонов в горящий отсек.
Несущий винт вертолета состоит из втулки и пяти лопастей. Втулка имеет горизонтальные, вертикальные и осевые шарниры и снабжена гидравлическими демпферами и центробежными ограничителями свеса лопастей. Лопасти цельнометаллической конструкции имеют визуальную систему сигнализации повреждения лонжерона и электротепловое противообледенительное устройство.
Рулевой винт толкающий, изменяемого в полете шага. Он состоит из втулки карданного типа и трех цельнометаллических лопастей, снабженных электротепловым противообледенительным устройством.
Управление вертолетом сдвоенное состоит из продольно-поперечного управления, путевого управления, объединенного управления «Шаг - газ» и управления тормозом несущего винта. Кроме того, имеется раздельное управление мощностью двигателей и их остановом. Изменение общего шага несущего винта и продольно-поперечное управление вертолетом осуществляются с помощью автомата перекоса.
Для обеспечения управления вертолетом в систему продольного, поперечного, путевого управления и управления общим шагом включены по необратимой схеме гидроусилители, для питания которых на вертолете предусмотрена основная и дублирующая гидросистемы.
Установленный на вертолете Ми-8 четырехканальный автопилот АП-34Б обеспечивает стабилизацию вертолета в полете по крену, курсу, тангажу и высоте.
Для поддержания в кабинах нормальных температурных условий и чистоты воздуха вертолет оборудован системой отопления и вентиляции, которая обеспечивает подачу подогретого или холодного воздуха в кабины экипажа и пассажиров. При эксплуатации вертолета в районах с жарким климатом вместо керосинового обогревателя могут быть установлены два бортовых фреоновых кондиционера.
Противообледенительная система вертолета защищает от обледенения лопасти несущего и хвостового винтов, два передних стекла кабины экипажа и воздухозаборники двигателей.
Противообледенительное устройство лопастей винтов и стекол кабины экипажа - электротеплового, а воздухозаборников двигателей - воздушнотеплового действия.
Установленное на вертолете авиационное и радиоэлектронное оборудование обеспечивает выполнение полетов днем и ночью в простых и сложных метеорологических условиях.
ВЕРТОЛЁТЫ
Рис. 1. К объяснению принципа полёта вертолёта
Несущий винт (НВ) служит для поддержания и перемещения вертолета в воздухе.
При вращении в горизонтальной плоскости НВ создает тягу (Т), направленную вверх и т.о. выполняет роль создателя подъёмной силы (Y). Когда тяга НВ будет больше веса вертолета (G), вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги НВ вертолет будет неподвижно висеть в воздухе. Для вертикального снижения достаточно тягу НВ сделать несколько меньше веса вертолета. Сила (P) для поступательного движения вертолета обеспечивается наклоном плоскости вращения НВ при помощи системы управления винтом. Наклон плоскости вращения НВ вызывает соответствующий наклон полной аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная - вызывать поступательное перемещение вертолета в соответствующем направлении.

Рис. 2. Основные части вертолета:
1 – фюзеляж; 2 – авиадвигатели; 3 – несущий винт; 4 – трансмиссия;5 – хвостовой винт;
6 – концевая балка; 7 – стабилизатор; 8 – хвостовая балка; 9 – шасси
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудо-вания. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения НВ, и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки – (МИ-24)). Силовая установка (двигатели) является источником механической энергии для приведения во вращение несу-щего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.).
НВ служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей
и втулки НВ. Трансмиссия служит для передачи мощности от двигателя к несущему и рулевому винтам. Составными элементами трансмиссии являются валы, редукторы и муфты. Рулевой винт (РВ) (бывает тянущий и толкающий) служит для уравновешивания реактив-ного момента, возникающего при вращении НВ, и для путевого управления вертолетом. Сила тяги РВ создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент от НВ. Для разворота вертолёта достаточно изменить величину тяги РВ. РВ так же состоит из лопастей и втулки.
Система управления (СиУпр) вертолета состоят из ручного и ножного управления. Они включают командные рычаги (ручку управления, рычаг «шаг-газ» и педали) и системы проводки к НВ и РВ. Управление НВ-ом производится при помощи специального устрой-ства, называемого автоматом перекоса. Управление РВ производится от педалей.
Взлетно-посадочные устройства (ВПУ) служат опорой вертолета при стоянке и обеспе-чивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж.

Рис. 3. Общий вид конструкции вертолёта (на примере боевого вертолёта МИ-24П).
Вертолет - это винтокрылая машина, в которой подъемную силу и силу тяги создает винт. Несущий винт служит для поддержания и перемещения вертолета в воздухе. При вращении в горизонтальной плоскости несущий винт создает тягу(Т) направленную вверх, выполняет роль подъёмной силы(Y). Когда тяга несущего винта будет больше веса вертолета(G), вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги несущего винта вертолет будет неподвижно висеть в воздухе. Для вертикального снижения достаточно тягу несущего винта сделать несколько меньше веса вертолета. Поступательное движение вертолета(P) обеспечивается наклоном плоскости вращения несущего винта при помощи системы управления винтом. Наклон плоскости вращения винта вызывает соответствующий наклон полной аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная — вызывать поступательное перемещение вертолета в соответствующем направлении.
Рис 1. Схема распределения сил
Конструкция вертолета
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудования. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения несущего винта,и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки несущего винта (МИ-24)).Силовая установка(двигатели) является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.). Несущий винт(НВ) служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей и втулки несущего винта. Рулевой винт служит для уравновешивания реактивного момента, возникающего при вращении несущего винта, и для путевого управления вертолетом. Сила тяги рулевого винта создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент несущего винта. Для разворота вертолёта достаточно изменить величину тяги рулевого винта. Рулевой винт так же состоит из лопастей и втулки. Управление несущим винтом производится при помощи специального устройства, называемого автоматом перекоса. Управление рулевым винтом производится от педалей. Взлетно-посадочные устройства служат опорой вертолета при стоянке и обеспечивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж

Рис.2 Основные части вертолета:
1 — фюзеляж; 2 — авиадвигатели; 3 — несущий винт (несущая система); 4 — трансмиссия; 5 — хвостовой винт; 6 — концевая балка; 7 — стабилизатор; 8 — хвостовая балка; 9 — шасси
Принцип создания подъемной силы винтом и система управления винтом
При вертикальном полете п олная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на скорость уходящей струи:

где πD 2 /4 - площадь поверхности, ометаемой несущим винтом; V— скорость полета в м/сек; ρ — плотность воздуха; u — скорость уходящей струи в м/сек.
По сути сила тяги винта равна силе реакции при ускорении воздушного потока
Для того чтобы вертолет двигался поступательно, нужен перекос плоскости вращения винта, причем изменение плоскости вращения достигается не наклоном втулки несущего винта (хотя визуальный эффект может быть именно такой), а изменением положения лопасти в разных частях квандрантов описываемой окружности.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг - это360º . Тогда примем заднее положение лопасти за0º и далее через каждые90º полный оборот. Так вот лопасть в интервале от0º до180º - это лопастьнаступающая , а от180º до 360º -отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила.

Рис.3 Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает». В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явныйпереворачивающий момент . При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены вовтулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов:горизонтальные, вертикальные и осевые.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне .

Рис. 4 Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
От0º до90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх (специалисты говорят «делаетвзмах »). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шар-нир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. ЗдесьУ - это подъемная сила,Х - сила сопротивления,Vy - вертикальное движение воздуха,α - угол атаки.)

Рис.5 Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще исилы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тягавтомата перекоса вертолета . Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки0º , опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы «машут » или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в10 раз , а центробежная - в100 раз . Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и естьплоскость вращения винта (см рис1.)
Для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении180º должна опуститься, а в положении0º (360º) должна подняться. То есть в точке180º подъемная сила должна уменьшиться, а в точке0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке180º и увеличив его в точке0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно,циклично .Он так и называется циклический угол установки лопасти (циклический шаг винта ). Я выделяю это название потому, что существует еще иобщий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия выполняетавтомат перекоса вертолета . Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз), акрен , соответственно, относительно его продольной оси (наклон влево-вправо).
Конструктивноавтомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же.

Рис. 6 Автомат перекоса модели вертолета
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги6 . Эти тяги соединены с так называемой внутренней тарелкой2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору3 . При изменении своего наклона (углового положения) она воздействует на тяги6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого - этовнешняя тарелка винта1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа4 и по каналу крена5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении.
Общий шаг винта меняется перемещением по оси винта внутренней тарелки2 при помощи механизма7 . В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса.

Рис. 7 Втулка винта с автоматом перекоса (схема).

Рис. 8 Поворот лопасти в вертикальном шарнире втулки несущего винта.

Рис. 9 Втулка несущего винта вертолета МИ-8